João Carvalho
Senior Research Scientist @ DFKI
I am a Senior Research Scientist and Deputy Department Head of the
Systems AI for Robot Learning (SAIROL)
department at the
German Research Center for Artificial Intelligence (DFKI).
I am also affiliated with the
Intelligent Autonomous Systems
group of TU Darmstadt.
My research interests are on developing machine learning algorithms for robotics, particularly imitation learning
and reinforcement learning for robot manipulation. I've developed algorithms that use deep generative models for visuomotor policies, motion planning and
grasping, and on reinforcement learning methods to solve contact-rich tasks like insertions. In the past, I've also worked on sample efficient
off-policy reinforcement learning algorithms, and on variance reduction techniques for policy gradients.
latest news
all newsDiminishing Return of Value Expansion Methods has been accepted to IEEE TPAMI. |
|
Two workshop papers accepted at ICRA 2026: |
|
I’ve joined the SAIROL department from DFKI as a Senior Research Scientist. |
|
Robot Path Planning via Flow Matching accepted at the German Robotics Conference. |
|
Motion Planning Diffusion accepted at T-RO. |
|
Model Tensor Planning accepted at TMLR. |
|
The learning chapter in Robotics Goes MOOC was finally published. |
|
Global Tensor Motion Planning accepted at RA-L. |
|
Four papers accepted at the German Robotics Conference. |
|
I started a new position as Postdoctoral Researcher at IAS. |
key publications
all publicationsPlease visit Google Scholar for a complete list.
2026
-
-
Geometry-Aware Probabilistic Shared Autonomy with Riemannian Motion Policies
ICRA Workshop: Geometry in the Age of Data-Driven Robotics, 2026
-
Real-World Deployment of Massively Parallel Sampling-Based MPC for Contact-Rich Manipulation
ICRA Workshop: Frontiers of Optimization for Robotics, 2nd Edition, 2026



2025




2024


2023


2022
-
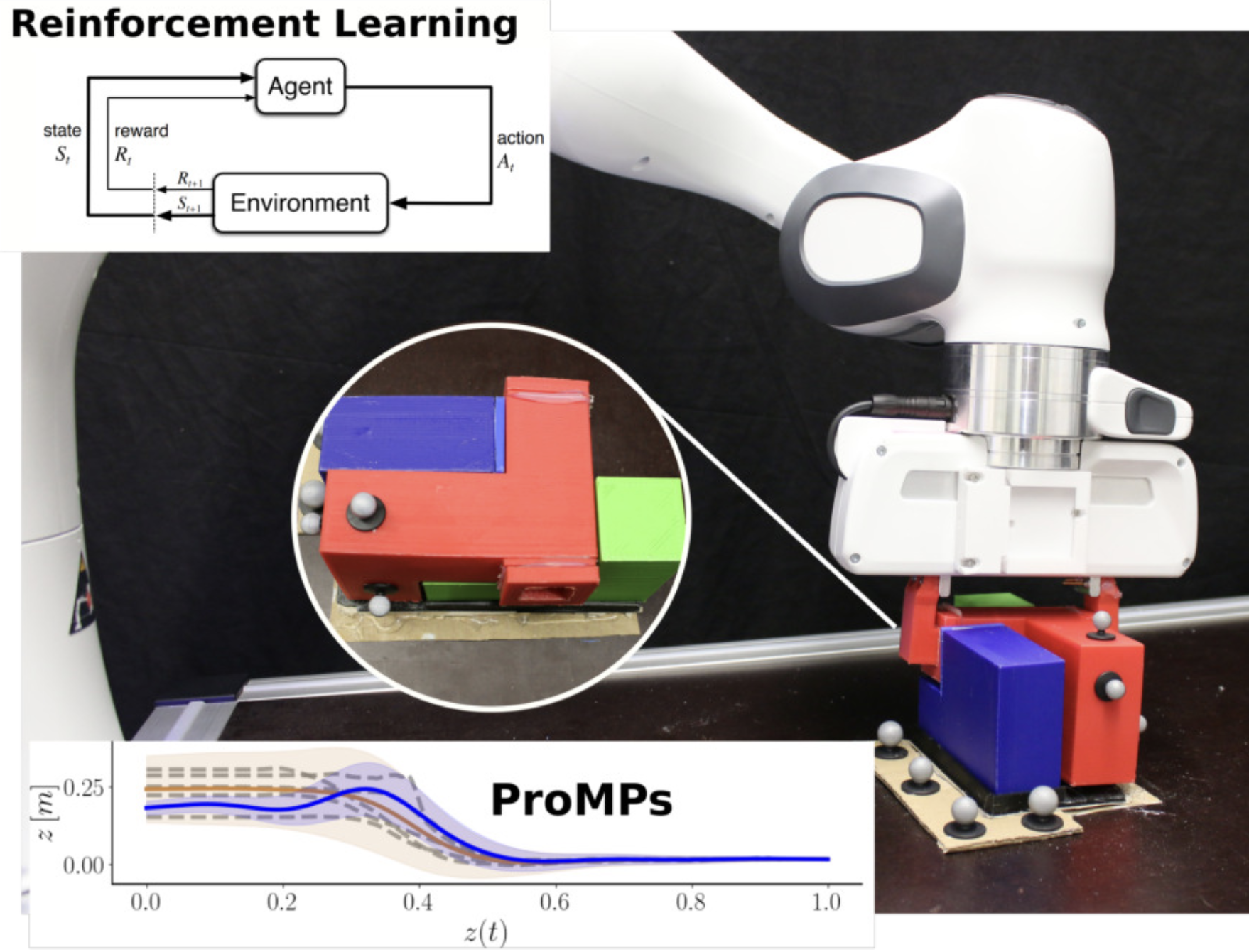
Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement Learning
Humanoids, 2022
-
Conditioned Score-Based Models for Learning Collision-Free Trajectory Generation
NeurIPS Workshop SBM, 2022
-